



A plan view of the high density, colorized LiDAR point cloud collected
The R.E.Y. Engineers team was sent deep in the foothills of the Sierra Nevada mountains to collect high density LiDAR. Our client, a power company, was concerned about steep rock faces directly above a penstock that was feeding a powerhouse another 2300’ down to the base of the mountain. Having had a previous penstock destroyed by falling rocks, the power company’s engineers were looking to leverage new technology to identify issues and create solutions to hold the power of Mother Nature back. They needed as dense of LiDAR point cloud as we could provide with a minimum of 1 point per square inch. Traditional manned aircraft LiDAR would not be dense enough and using conventional LiDAR scanners would not feasible due to the extreme elevation difference, large area, and ruggedness of the rock face.

A view of the rock face in relation to the penstock below.
This is where the use of a drone was most ideal. R.E.Y. deployed the DJI Matrice 600 heavy lift drone with a Riegl Mini-VUX and a Sony A600 digital camera. The LiDAR unit is able to collect 100,000 points per second and the camera is set to capture an image every 1.5 seconds. The drone would have to travel up and over a ridge 1,500’ above the only reasonable launch and recovery zone reachable by truck. With the large area, steep relief, and high-density LiDAR point cloud requirement, this would not be a one flight mission. A series of 15 flights would be completed to cover the area. With the subject matter being multiple rocks of all shapes and sizes, and the LiDAR being an “in-line” scanner, the flight plans would have to be slightly offset and at different angles from each other. Having different angles and viewpoints to the rocks below, a full model of the rocks and terrain could be more accurately mapped, and less interpolation would be needed. The dense LiDAR point cloud could show large crevasses in the rocks along with any undercuts and areas where dirt had already started to slide.


The “small mountain trail of a road” used to reach the survey area.
Once the onsite collection was completed, the data was processed and registered to our survey control. The point cloud was exported, and the extraction team went to work. Having collected nadir imagery along with the LiDAR, we were able to create an orthomosaic image and also colorize the point cloud. This was very helpful for the team to be able to distinguish between the bushy vegetation and the granite rock faces. They created a digital terrain model of the site and identified the large rock outcrops the engineers were looking to hold in place.

The GNSS base station and UAV flight crew looking up at the daunting sheer rock face.
Having a few years of experience flying drone-based LiDAR, I have found they don’t send us out to the easy and flat jobs right off a nice paved road. This is just one example of the many times we have been tested on some way off the beaten path difficult jobs. Just getting to the job was a challenge. Two hours driving a winding road all the way around the reservoir to reach the base camp. After reaching the base camp that is when it got really interesting. A road barely wide enough to fit a truck carved into the side of a sheer rock face. It is rock face on one side and sheer canyon on the other side with bridges built in areas where the ground just seemed to disappear.
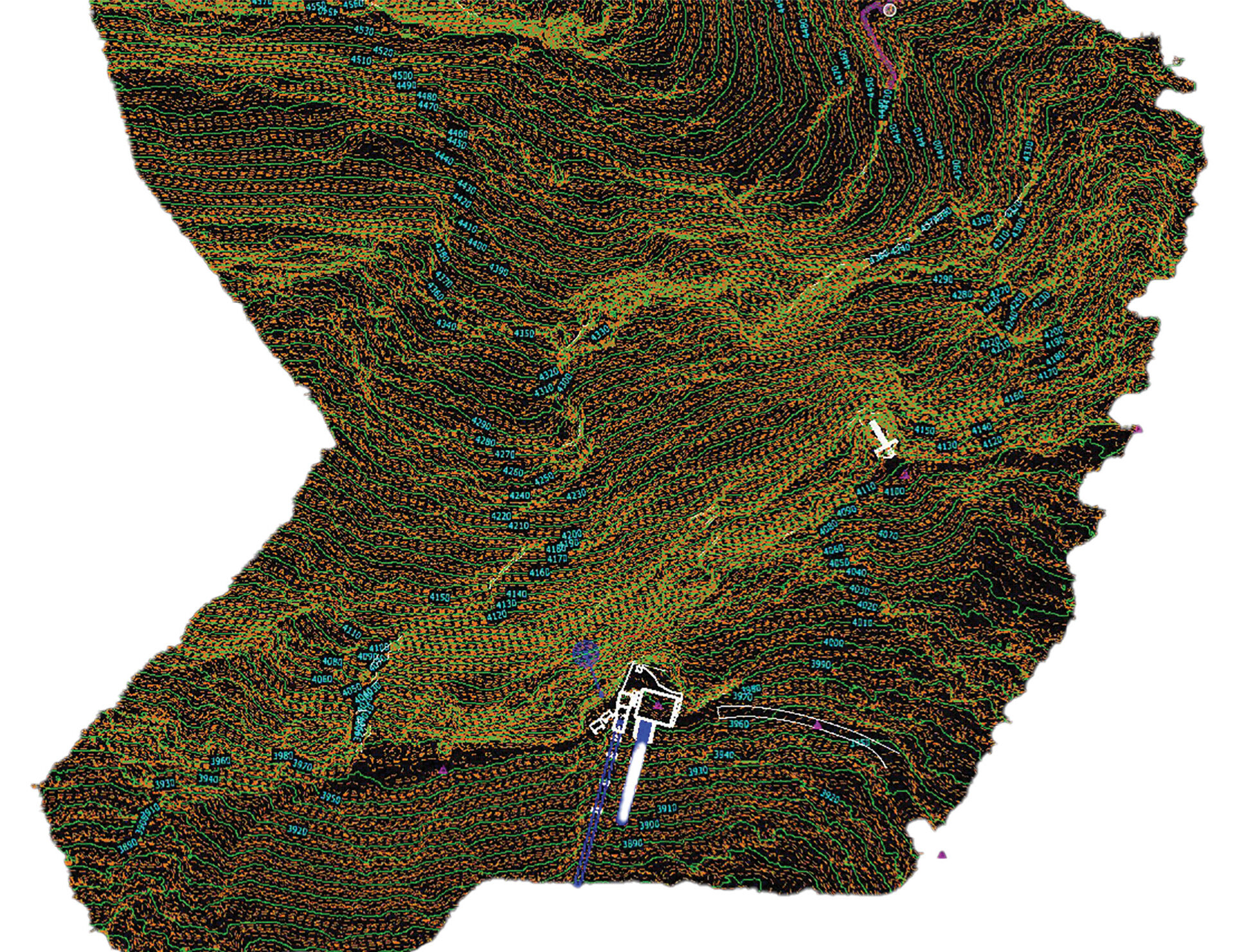
3D mapping and contours created from the high density LiDAR point cloud.
Although we had all the cool technology to see where and what needed to be deemed safe, I was able to attest to the soundness of the rocks from the hands-on experience of the earthquake, having stood at the bottom and faced it myself. It was just another day at the “high tech tail-gate offices” of R.E.Y. ◾
Jed Gibson is a licensed Professional Land Surveyor in California and Nevada. He is the Lead UAV LiDAR Pilot and Project Manager at R.E.Y. Engineers, Inc., headquartered in Folsom, CA. He has been surveying since 2014 and has an extensive background in remote sensing, land surveying, and large-scale topographic mapping projects, including the Oroville Dam, the tallest dam in the United States.