


But before the Orion spacecraft can be launched into space, it must first be moved from the Vehicle Assembly Building to the launchpad at the Kennedy Space Center.
Enter the Crawler-Transporter (CT), four connected building-sized vehicles on rolling tracks, which, when loaded with the Orion and its mobile launcher, will carry over 25 million pounds. That’s the equivalent of 1020 school buses, one of the heaviest overland loads ever recorded.
The challenge of moving 25 million pounds

To address this risk, the agency partnered with engineering firms Langan and Jones-Edmunds to monitor ground deformation under the CT in real time. The solution Langan developed was a surveying process for taking measurements on both sides of the CT simultaneously, collecting data every 10 feet along the 4.1-mile crawlerway.
The hardest part: they needed to survey the CT in motion, making the project exponentially more complex.
The process required establishing hundreds of control points as part of the baseline setup. Real-time surveying of the CT involves a team of 14 professionals working together, their movements carefully timed as the CT creeps along at roughly 26 feet per minute. Designing the solution took a full two years—and had to account for many moving parts.
Deconstructing the surveying project

Next, the team established the survey control networks, setting up control points every 600 feet to measure location and elevation to one one-hundredth of a foot.
The primary control network with over 100 control points was established prior to the monitoring surveys. GNSS was used to determine the horizontal positions of these points and a closed differential level loop run to determine their elevations.
There was only one problem
Inside the CT’s zone of influence, the weight of the CT could move the ground under the surveying equipment itself, impacting the accuracy of the data. To account for this risk, Langan set up a secondary survey control network outside the zone of influence, effectively doubling the number of measurements taken.


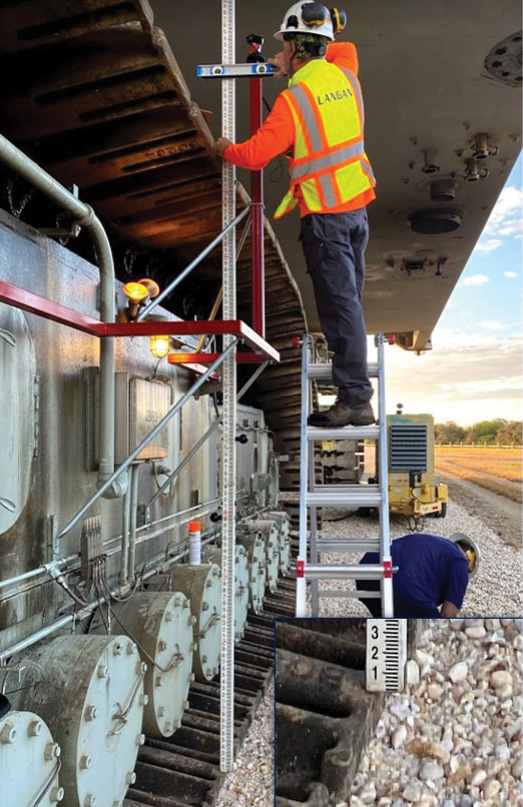
Once the CT was within range the instrument operators would look through the total station to fix the crosshairs upon the 360° prism mounted to the CT. This was needed to allow the robotic total station to automatically and continually track the prism and make constant calculations about how far the prism was from its last recorded position. Once a distance of 10 feet from the previously recorded position was achieved, the data collector would store the prism coordinates (X,Y,Z) and use the newly stored position as the updated reference position to prepare for the next upcoming measurement. This procedure allowed us automatically to take measurements of the CT every 10 feet utilizing the technology of the robotic instruments. Team members would then enter the elevation of the recorded measurement into a spreadsheet that was used to aggregate the measurements from all four total stations being used.
Dry run

Langan sends the measured data to a shared spreadsheet within seven seconds, using a formula to determine whether any ground deformation detected is within normal limits. At that point, the Jones-Edmunds team is responsible for deciding whether it’s safe to keep rolling or whether the CT must stop.
The final test, however, will come when the CT finally carries the Orion to the launchpad. That day will represent years of preparation in support of a groundbreaking mission decades in the making, one that will help humans reach new frontiers in space.
Social posts
Learn how Langan is helping prepare for the upcoming @NASAArtemis #space mission #surveying #engineering #NASA; or how Langan is using real-time #surveying of a moving object to support the @NASAArtemis #space mission #engineering #NASA
Bryan Merritt, PLS/PSM is a Professional Land Surveyor licensed in New York and Florida. He serves as a Senior Survey Manager in charge of Florida and the Caribbean for Langan Engineering and Environmental Services Inc. He has been surveying since 1982 and has an extensive background in all facets of surveying methodologies.
Gary McDaniel, PSM started surveying in 2012 after teaching high school physics and chemistry for seven years. He earned his Professional Survey and Mapper License in Florida in 2019 and has been a licensed sUAS pilot since 2017.