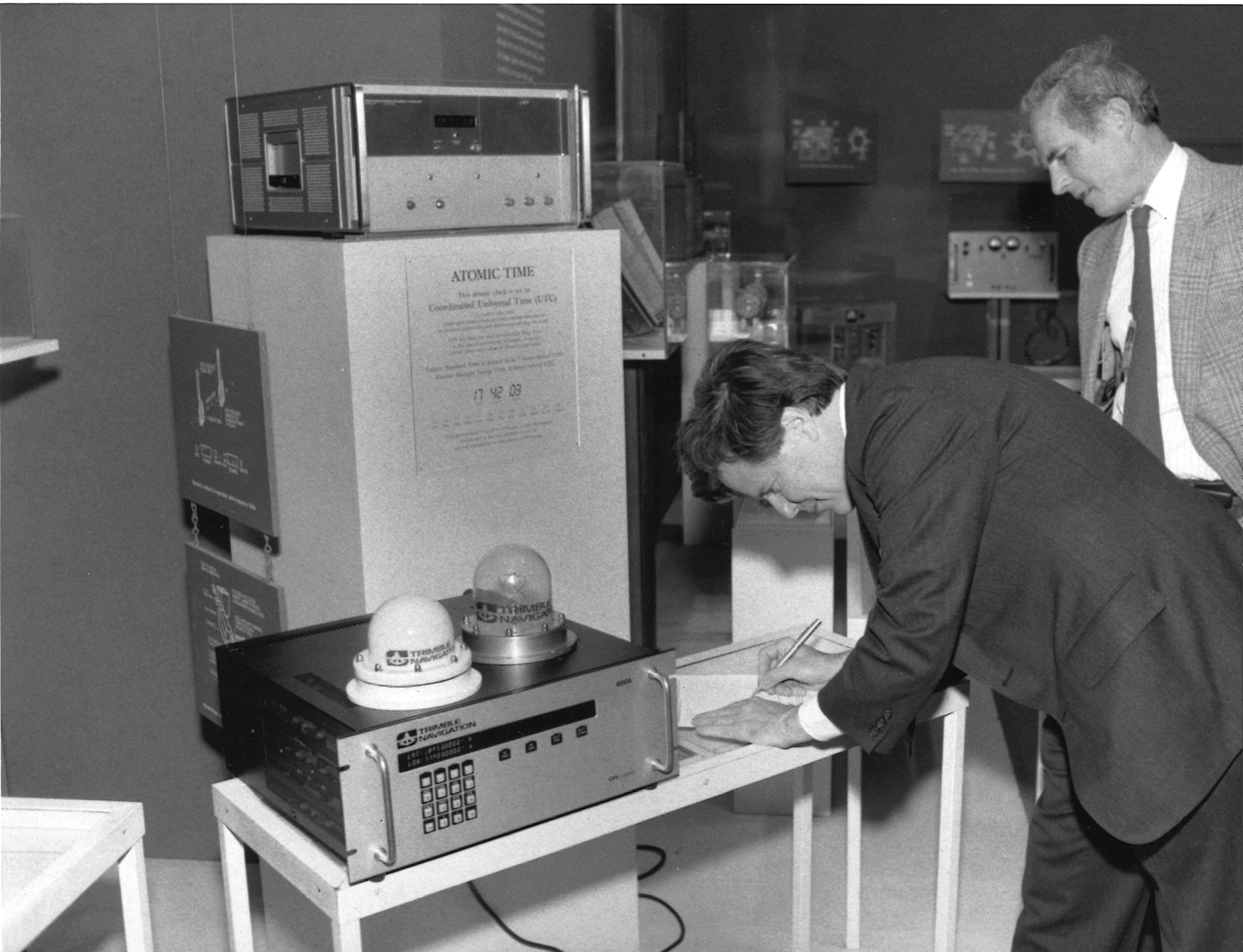
Left: Charles R. Trimble signs a gift agreement for Trimble’s first production GPS receiver at the Smithsonian Museum, Washington, in late 1985 or early 1986. Source: Trimble
When it comes to Real Time Kinematic (RTK), full appreciation of its development trajectory means never forgetting its roots, especially the predecessor technologies and research steppingstones that advanced the use of the Global Positioning System (GPS) for static and kinematic surveying.
In this second article exploring the history of RTK, we focus mostly on the 1980s to look at what confirmed or inspired further exploration of GPS for land and marine surveying and foreshadowed an intense period of development (to come in Part 3) in the first half of the 1990s as geodesists, scientists and engineers tried to build the perfect system.
Cornerstone: Using extraterrestrial systems for centimeter-level accuracy
The development of satellite geodesy would rest on the foundation of using phase differencing for high-accuracy baseline determination, such as was used with Very Long Baseline Interferometry (VLBI). GPS, which launched its first satellite in 1978, was designed to use code-based signals for real time accuracies of 3-to-5 meters horizontal and 10-to-15 meters vertical, but there was so much more potential.

A Texas Instruments 4100, or TI 4100, which was used in early GPS surveying experiments. Source: NOAA
Clever scientists determined they could use GPS satellites in a similar way, using two receivers to interpret its non-code signals, called carrier-phase signals, for precise measurement to the accuracy of centimeters. This was known as carrier-phase differential GPS positioning, and a host of individuals started developing software algorithms for extracting and processing that data, as well as developing techniques to improve GPS surveying capabilities.
One of those individuals was Dr. Benjamin W. Remondi, a GPS technologist for the National Geodetic Survey (NGS) who in the early 1980s began a long, productive career in static and kinematic positioning based primarily on GPS observations. His body of work over several decades included more than 50 technical papers on methods still in use today, such as the triple differencing method, the antenna exchange method, and the kinematic survey method. Researchers in the field would come to refer to him as “the father of Real Time Kinematic survey.”
Meter-level positioning at sea
Prior to Remondi’s research, there were also technologies that routinely used broadcast radio waves for meter-level positioning of marine vessels performing engineering and construction work in the world’s ports and harbors.

A USACE survey crew sets up a Raydist base station around 1980. Source: Steve DeLoach
One was Raydist, a marine navigation system that relied on carrier signals broadcast from land-based shore stations. In the 1940s, engineer Charles Hastings developed a method to measure the phase shift of a signal superimposed on radio waves transmitted between aircraft and a ground station. This led to the Raydist radio wave system for accurately measuring distance through continuous wave phase comparison.
Raydist was in use for hydrographic positioning and dredging when Steve DeLoach, a civil engineer and land surveyor, began working for the U.S. Army Corps of Engineers (USACE). “We had to run geodetic control along all the nation’s bays, rivers and harbors to establish stations to locate the Raydist towers and had to set ‘spar buoys’ along the shipping channels as known points, and locate these geodetically, with multiple angle resections from shore,” said DeLoach, now retired. “These spar buoys were often many miles offshore bobbing about. The boat would pull alongside, and the captain would yell ‘mark’ so the Raydist operator could enter the correct number of cycles from the two base stations.”
As a young engineer DeLoach was dumbfounded at the Raydist system’s mass of paper tape, whirling analog dials, massive ships’ power systems (fire hazards), and no vertical positioning. “All vertical information was from a tide station that was miles away, therefore in significant error.”
But those issues aside, Raydist represented the same type of solution as GPS ambiguity resolution, making GPS carrier-phase positioning worth pursuing for hydrographic surveying. “The method of using a known static point to ‘resolve integers’ is exactly what the old 1960s Raydist system did in the marine environment,” DeLoach said.
Comparing Raydist and other marine navigation systems was a way to prove that GPS could actually work and provide compatible results, and those results also helped DeLoach make his case with USACE for funding in the late 1980s for a major project to develop a GPS carrier-phase positioning system for hydrographic surveying and dredging that would lead to RTK development.
“Raydist counts lanes of phase difference, and that is exactly what geodetic GPS does,” DeLoach said. “It’s the same basic math problems—just complicated by satellites orbiting versus base stations on the ground.”
Remondi would join the dredging project team in 1989 as one of its key problem-solvers, but before that phase of development could begin, other steppingstones on the way to RTK needed to be found.
Centimeter GPS positioning on land

Dr. Clyde Goad (right) conducting a kinematic survey with another USACE employee. Goad published the results in “Kinematic Survey of Clinton Lake Dam”, ASCE journal of Surveying Engineering, Feb 1989. Source: Steve DeLoach
The Macrometer was another predecessor technology demonstrating centimeter-level accuracy in GPS positioning. In the 1980s, Charles Counselman, a physicist at the Massachusetts Institute of Technology (MIT), led the development of the Macrometer V-1000. According to a 2010 article on Counselman by MIT Technology Review, a NASA scientist labeled Counselman’s invention as “snake oil” but would soon be proven wrong as it represented a new way to harness GPS by combining expertise in radio and astronomy.
Counselman proved his technology in a series of demonstrations in the early 1980s and was subsequently granted 36 patents. But while the Macrometer demonstrated extraordinary accuracy, it had downsides for everyday civilian surveying uses. It was expensive, heavy, took two people to carry, and had to be transported in a utility vehicle. Even so, it would play an important role in research on the way to more streamlined and nimble commercial GPS systems.
“Today, GPS receivers embodying Chuck’s technologies are portable, inexpensive, and ubiquitous,” noted a 2008 article when Counselman received the Charles A. Whitten Medal from the American Geophysical Union. “Look under the hood and you’ll find many of his basic patents inside.”
GPS data simulation for precise carrier phase data
After earlier work in orbital mechanics and software development (see Part 1), Remondi was hired in 1981 by Admiral John Bossler and Dr. Clyde Goad to work at the NGS to solve “a most important problem”—using GPS for surveying at centimeter-level accuracy.
At the time, there was no carrier data, so Remondi’s first activity was to write a GPS data simulator for precise carrier phase data. During that time, Remondi recalls being given tremendous freedom as a researcher, including use of the lab’s minicomputer. The combination made developing software at NGS “amazing,” he said. “I had been programming by that time probably 20 years of my life, and it was always a burden. Sometimes I had to wait two or three days in the early days for a response to a program, and another two to three days to get feedback. Now, it was instantaneous. I could do two lines of code and ask it to compile and run two more lines of code. This was just unbelievable. This just super-charged me like you can’t believe.”
With this new computing power, Remondi wrote two software programs that could process his simulated data. One used an interferometric search method he learned from Counselman and Sergei A. Gourevitch (Miniature Interferometer Terminals for Earth Surveying: Ambiguity And Multipath with Global Positioning System, October, 1981), while the other was a triple-difference program of his own invention. The programs were written to anticipate cycle slips and repair them if desired.
There was an obsession with cycle slips, and the interferometric methods Remondi got from Gourevitch and Counselman enabled him to develop advanced computer methods to speed up the time for processing by a factor of 100,000. The triple-difference method, while considered naïve on the theory that there would be too little signal, was faster in processing, detected cycle slips and worked fine.
Collaboration and data familiarity advance RTK methods

The TI 4100 in use in Alaska in 1984 (approximately). Source: NOAA
Also, to support Remondi’s initial work, Bossler approved the purchase of two Macrometers at $250,000 apiece. “They are usually $300,000 but we got them for a Sunday Special,” Remondi recalled. The receivers tracked six GPS satellites, were codeless, and had weak signals, but with a small dataset provided by MIT, “miraculously, my programs worked.”
Meanwhile, NGS was working with four sister government agencies to partner with Texas Instruments to develop the TI 4100, one of the first commercial GPS receivers and antennas. The TI 4100 team included excellent engineers writing simulation software, Remondi said, and he contributed timing software to their efforts. “They liked my contribution, and good relations were established.”
After receiving the Macrometers, the NGS team put them to work surveying the nation. It was no small logistical and physical effort, because the receivers were heavy, required large batteries and had to be time-synced. The team had to generate orbital data in the home office and send it to the field.
“I became extremely cozy with the data,” Remondi said. “I noticed that a tracking channel could get confused and switch satellites when the doppler signal was the same. The receiver would then report the wrong satellite. This was easy to fix, but it pointed to how close I was watching the data. MIT was unaware of this sympathetic tracking behavior.”
Goad and Remondi shared the results of this work in 1984 in “Initial Relative Positioning Results Using the Global Positioning System.”
Initialization without sitting still for hours
Also, in the 1983-84 timeframe and as part of the Macrometer testing, Larry D. Hothem, a geodesist with the United States Geological Survey, set up a test network in California with survey marks near each other. At the time, it was taking three hours at each monument to establish a position, and Remondi thought there had to be a more efficient way. He realized the long stays at each monument were to give time for the satellites to move and wondered if they should stay a couple of minutes at each site and return several times. “I did not experiment with this method right then,” he said, “but I did later.”
The jumping from site to site made him wonder: Could the antenna be moved from a known site to an unknown site while maintaining carrier tracking? “While I believed the Macrometers could not do this, I thought if I rotated the antenna very slowly, I could prove the point. I asked Professor Counselman if such tracking could be done. He said, no, but if there was an application, they would consider it.”
By the spring of 1984, Remondi—inspired by a paper by Dr. Alan G. Evans at the Naval Surface Warfare Center (NSWC) that proved carrier tracking could be done while moving—set up a kinematic (or motion geometry) test, but it didn’t work.
He learned from Texas Instruments engineers that, with an increase in bandwidth, the TI 4100 could track the carrier when the antenna was in motion. Next, he asked his colleagues at NSWC to modify the receiver’s software to widen the bandwidth to 8 Hz. With this change, Remondi repeated his experiment, with field personnel carrying an antenna around a roughly square path and sending the data to him.
Antenna swapping—an awkward dance

The Trimble 4000A GPS Locator was one of the first GPS positioning products used by hydrographic survey boats. Even though coverage times were only 4 or 5 hours because there were only a few GPS satellites in orbit at the time, the receiver paid for itself quickly by saving time and resources. Source: Trimble
The experiment was successful. With that proof, Remondi designed more interesting experiments to travel between known survey marks using RTK. “Those tests were not in real time yet, so we called the method ‘kinematic’ and not ‘RTK,’” he said. “One of those experiments added the technique of swapping antennas.”
It looked like an awkward dance. Picture two tripods, each with a GPS antenna, and two guys lifting the antennas carefully up over their heads so they don’t interfere with the signal and then walking around each other to set the antennas down on the other tripod, and not tangling the cords in the process. “They looked silly while doing it,” said DeLoach, and at some point, the antenna swap started being referred to as “the Remondi Foxtrot.”
The article “Performing Centimeter-Level Surveys in Seconds with GPS Carrier Phase: Initial Results” (NAVIGATION, Journal of The Institute of Navigation, Winter 1985-1986), describes the initial tests: “The results of this experiment show that centimeter-level relative surveys can be performed in seconds. A priori geodetic coordinates of the initial location of the ‘roving’ antenna are not required since they, too, can be determined within seconds.”
Surveying with kinematic GPS—stopping only for a few seconds—seemed preposterous to many of Remondi’s colleagues. Until it didn’t. One scientist eventually apologized for his skepticism, and receiver manufacturers started asking for the capability. “The antenna swap was greeted with a big ‘wow’ and without skepticism,” Remondi said, “meaning my work was beginning to be taken seriously.”
GPS commercial development: What can we do to keep the company going?
Hydrographers use the Raydist system in the Gulf of Mexico. Source: NOAA’s Photo Library
Alongside the scientific work of GPS technologists like Remondi were efforts by commercial GPS pioneers, including Charles R. Trimble, who founded the company in 1978 to initially focus on Loran-C, a hyperbolic radio navigation system, but in 1982 began developing receivers using GPS signals.
Unlike scientists at NGS or the Department of Defense who had access to the computer systems that tracked the GPS satellites and could develop the ephemeris data for their calculations, surveyors needed receivers that could download and understand the ephemeris, or orbital data.
In 1984, Trimble introduced one of the first GPS positioning products, called the 4000A GPS Locator, a C/A code receiver intended to replace Loran. The main users for the 4000A were hydrographic survey boats locating previously drilled holes over which to build oil platforms.
Then, on Jan. 28, 1986, the Space Shuttle Challenger was engulfed in flames 73 seconds into flight, killing all seven crew members aboard. Also lost in the explosion was a satellite to enhance coverage worldwide. It would be two more years before additional GPS satellites could be launched.
Unlike other GPS manufacturers that were able to shift to other areas of production, Trimble was invested almost exclusively in GPS. “Here was Charlie with a commercial company, and all of a sudden, the whole GPS program came to a halt because they could no longer launch satellites,” said Mark Nichols, general manager at Trimble and one of the company’s early RTK development leaders. “So, he turned to Ron Hyatt, who also came out of HP, and said, ‘What can we do with GPS to keep the company going when there aren’t enough satellites in the sky?’”
They shifted the company’s focus to time transfer because it was possible to get atomic clock accuracy timing out of a GPS receiver with only one or two satellites, and also to the development of GPS static carrier-phase differential positioning for geodetic surveying.
“GPS entered into the surveying industry by virtue of Trimble looking for a commercial application after the Space Shuttle disaster,” Nichols added. “And it was used initially for doing control surveys over long distances.”
Check out our next issue for History of RTK—Part 3
Link to part 1: https://amerisurv.com/2021/04/18/history-of-rtk-part-1-a-really-tough-problem-to-solve/
Stacey Hartmann writes about surveying and geospatial topics for Trimble’s Geospatial division.