
PX-80’s proprietary SLAM was developed for capturing both indoor and outdoor spaces.
In the past few years, SLAM-based handheld lidar scanners have made a big entrance into the 3D-capture market. These solutions are becoming popular not simply because of their speed, low cost, or ease of use—but because the combination of these three factors has opened up entirely new use cases for 3D capture that weren’t possible with traditional methods.

Amir Rubin, president and co-founder of Paracosm.
Florida-based Paracosm1 is at the forefront of this development. Its flagship product, the PX-80 handheld lidar scanner, has helped surveyors to capture large indoor and outdoor areas that would have been prohibitively slow with conventional methods, enabled AEC firms to capture building sites with a frequency that they never considered before, and allowed total beginners to capture 3D data that would have once required a team of trained professionals.
From consumer roots
Readers may not expect that Paracosm was founded to develop 3D-mapping technology for consumer applications—and that today’s PX-80 enables a wide variety of use cases precisely because it developed out of those consumer tools.
As you walk through a space with the PX-80, the SLAM tracks your path and creates a coherent point cloud of the environment.
Paracosm was co-founded by current president Amir Rubin, an engineer who cut his teeth at a range of startups in the surprisingly tech-friendly Florida university town of Gainesville, which gave rise to well-known companies such as WebMD and the defunct music streaming platform Grooveshark. After a decade working as an engineer and developer in other people’s companies—and a short time developing a patented system for weighing livestock using only an RGB camera—Rubin gathered a team to start working toward his own vision: a product that would enable anyone to map the world in 3D.

The system utilizes a Velodyne VLP-16 lidar sensor.
At first, Rubin explains, that took the form of a low-cost 3D technology for collaborative mapping. This technology caught the attention of Google, which enlisted Paracosm to help on an ambitious initiative called Tango, the world’s first 3D-mapping smartphone.

Paracosm’s handheld PX-80 fuses data from an RGB sensor, a lidar and an IMU to produce accurate and colorized point clouds as the user walks.
In 2015, Paracosm finished developing its own low-cost, consumer-grade, handheld 3D-mapping system. Though the tool attracted interest and investment from consumer robotics companies such as iRobot, it also caught the eye of a group that would prove more important to the company: engineers, contractors, and building surveyors. These forward-looking professionals saw that low-cost, SLAM-based 3D scanners had potential far beyond consumer applications.
“We started getting calls out of the blue,” says Rubin. “They saw our handheld scanning system and started asking if they could use it to scan MEP2 spaces, to do basic building survey, or to monitor their construction sites.”

An automatically colorized PX-80 point cloud of the interior of the Paracosm office.
The only problem was that the system relied on 3D data from a structured light sensor, a consumer-grade 3D-capture technology that Paracosm used because it was small and inexpensive. In other words, the system was optimized for consumer use, which limited its performance in more demanding applications. Rubin explains, “That’s when we re-imagined our tech from the ground up and asked ourselves, what does a perfect, fast, handheld building scanner look like?”

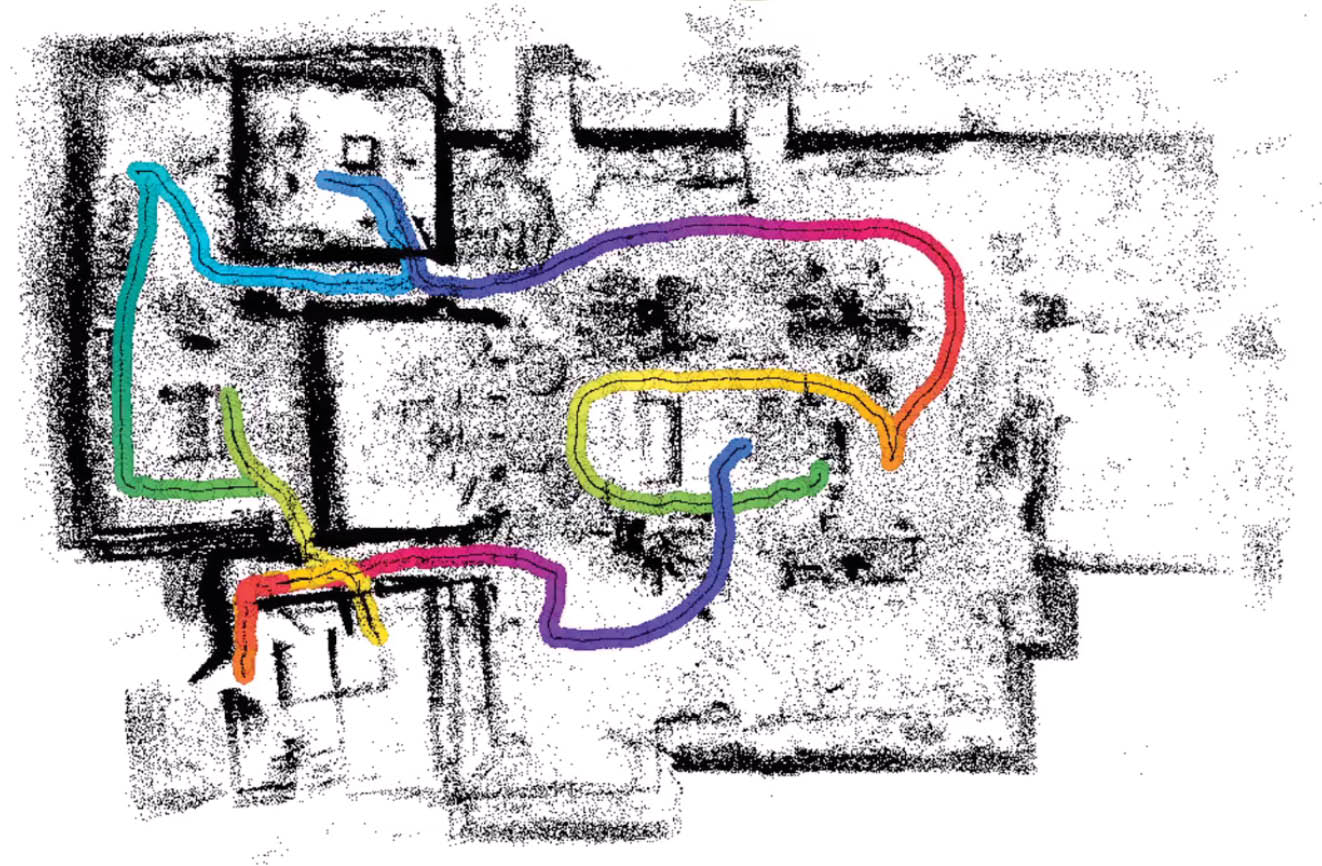
Floor-plan view of a PX-80 point cloud.
The result is PX-80, a handheld, SLAM-based, lidar scanner optimized for commercial applications. It features a Velodyne VLP-16 lidar—often seen in autonomous vehicles—alongside a panoramic camera and a survey-grade inertial measurement unit (IMU), all of which it uses to produce accurate 3D point clouds and automatically colorize those point clouds while the user moves at a walking pace. Since it began shipping in 2018, PX-80 has seen use in over 15 countries, and in applications such as MEP capture, 2D floor-plan generation, mine mapping, construction monitoring, and forestry.
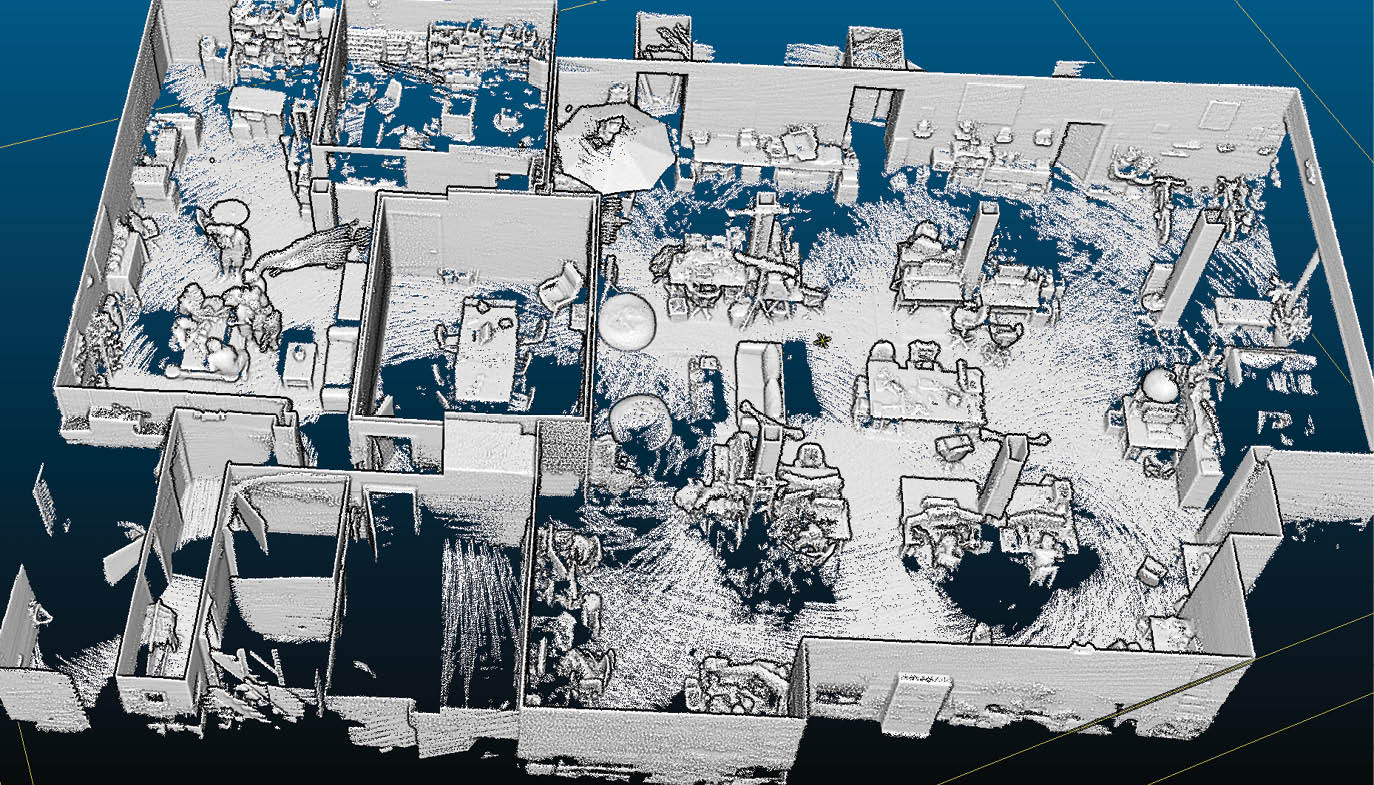
An uncolorized PX-80 point cloud of the Paracosm office.
A cutting-edge technology under the hood
Paracosm’s core product, however, isn’t scanning hardware. The Paracosm technology that has survived the transition from consumer-grade to survey-grade mapping, and all the hardware iterations in between, is its 3D-data processing algorithm.
This algorithm is built on a technology known as SLAM, or simultaneous localization and mapping. SLAM technology has its roots in robotics, where it was developed to help machines navigate unknown environments, a devilishly complex task that requires locating the machine in a new space at the same time as it maps that space for the first time. A SLAM algorithm works by gathering data from sensors onboard the robot—such as RGB cameras, lidar sensors, and IMUs—and fusing those data together to make its sophisticated calculations.

nmcn scanning for their farm refurbishment project.
SLAM algorithms can be optimized for mapping applications, facilitating the development of lidar scanners that don’t need a tripod or GNSS to return precise, accurate results. The SLAM powering the PX-80, for example, can determine exactly where the scanner was on a job site or building when it captured each photo and each portion of the point cloud. “You can think of each position, each step that it calculates on your walking path, as a virtual tripod,” says Rubin. “We use these to position the points captured by the lidar.”
This means that a SLAM-based handheld scanner like the PX-80 enables users to perform a capture at a regular walking speed. Thus SLAM-based scanning is much faster to capture large indoor and outdoor environments in 3D than traditional methods and offers the bonus of real-time tablet-based feedback on the scan being captured.
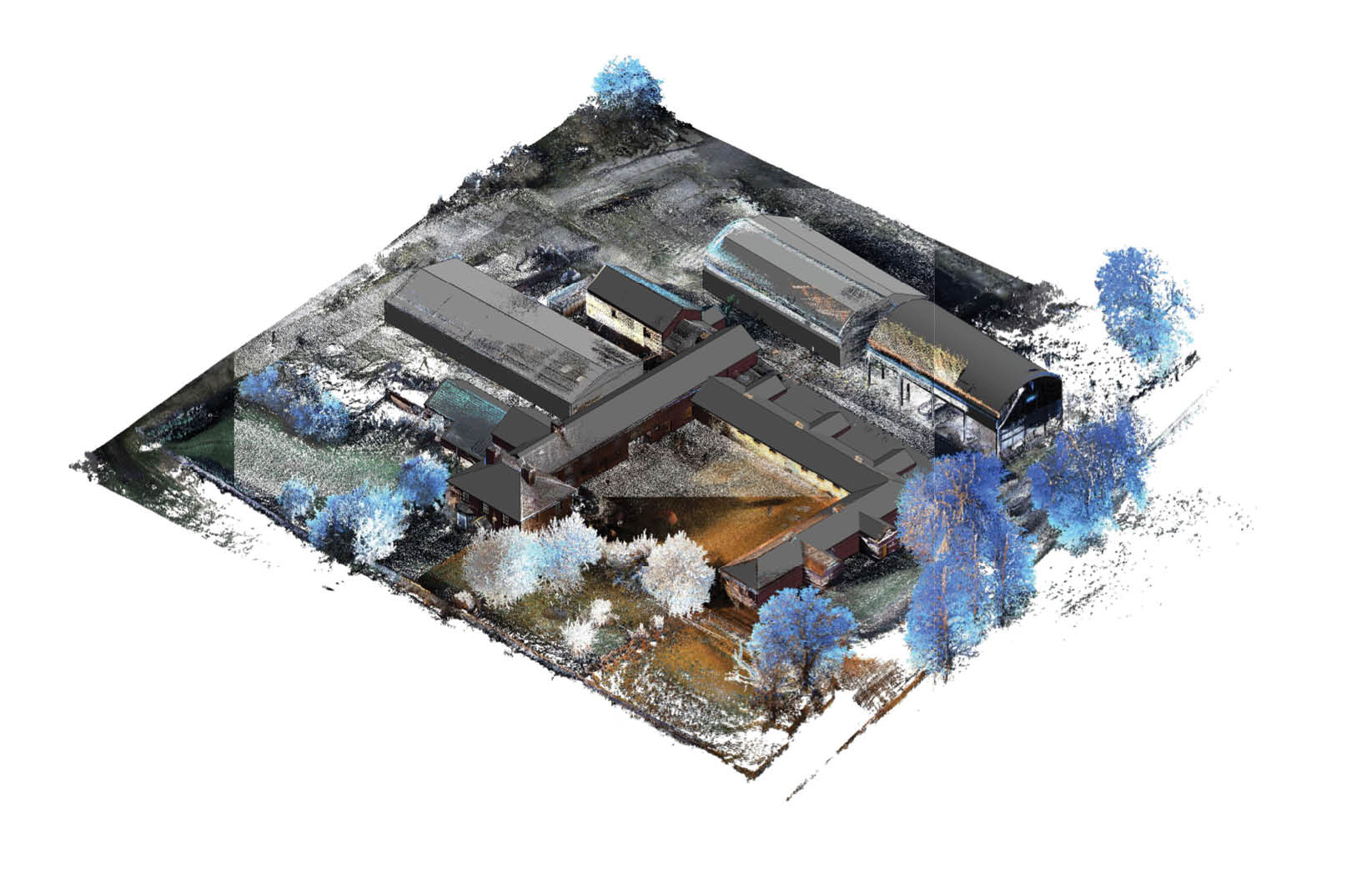
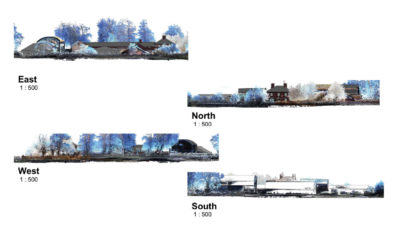
nmcn converted the point cloud of the farm buildings to BIM and laid the models on top of point cloud topographic data.
SLAM’s benefits do come with tradeoffs. In exchange for the greatly increased speed and lower cost of capture, SLAM generates data at a lower accuracy than traditional methods. PX-80, for instance, offers 1-3 cm global accuracy, whereas the top tier of tripod-based lidar systems perform in the millimeter range. However, many find that the reduction in overall cost and increased speed more than make up for this difference—whether that holds true for a project depends on whether the SLAM device offers good enough accuracy for the final project deliverable.
 The deliverable determines the tool
The deliverable determines the tool
When British general contractor nmcn learned about handheld 3D capture, they saw the technology’s potential. Like the engineers who called Amir Rubin in Paracosm’s early days, nmcn saw that handheld scanning could speed up their workflow and reduce costs, helping them to capture 3D data more regularly than traditional methods.
To test a PX-80 SLAM-based handheld lidar scanner, nmcn handed it to their head of digital transformation, Gary Ross. A mechanical engineer with no scanning experience, Ross received 15 minutes of training and set off immediately to scan a complex of derelict farm buildings. At the same time, a team from a 3D-scanning service provider captured the site using tripod-based lidar scanners. Both data sets were used to generate 2D floor plans and 3D BIM models.
In a final review, Ross argued that handheld SLAM-based scanning hit the right combination of speed, cost, ease of use and accuracy for the final deliverable they wanted. He says the PX-80 allowed him to capture the site at 1/10 the cost and 1/8 the time of traditional methods. He also notes that when nmcn generated models on top of the two point clouds, and then laid the models on top of one another, “There was 39 mm difference over the entire site, which spanned 57 m. The inaccuracies of modeling over the point cloud could have caused the 39 mm difference on either drawing, and as such the scanner technology was neither here nor there.”
nmcn determined that handheld lidar scanning won’t be appropriate for final deliverables that require sub-millimeter accuracy, but that hasn’t stopped PX-80 from changing the way the firm thinks about 3D. “This sort of shift in cost and time and skills needed leads to a complete re-think of how and why we use laser scans,” Ross says. Where, in the past, nmcn would scan a project once—at most—now, they can start to use scanning as a regular part of their process. “Certainly the scanner can now be used on every project, no matter how large or small.”
As proof, Ross offers a list of potential applications for handheld SLAM-based lidar scanning that includes floor-plan generation for asset management, as well as topology capture, construction progress monitoring, as-built generation, dilapidation monitoring, and logistics/traffic management, among many others.
Ross concludes by noting that the value nmcn finds in handheld, SLAM-based 3D capture is simple: it brings his team data that they would never have seen before. “As data is central to our effectiveness and efficiency gains as we develop,” he says, “this is a great leap forward in the data we can interrogate, analyze and measure—thereby improving the efficiency of our projects.”
Sean Higgins is the former managing editor of 3D-scanning industry publication SPAR3D.com, where he provided broad coverage of innovative commercial 3D technologies for five years. Currently, he heads up content strategy at Paracosm, where he develops materials to educate new and experienced 3D professionals about SLAM-based handheld lidar solutions.
1 https://paracosm.io/
2 Mechanical, electrical and plumbing.