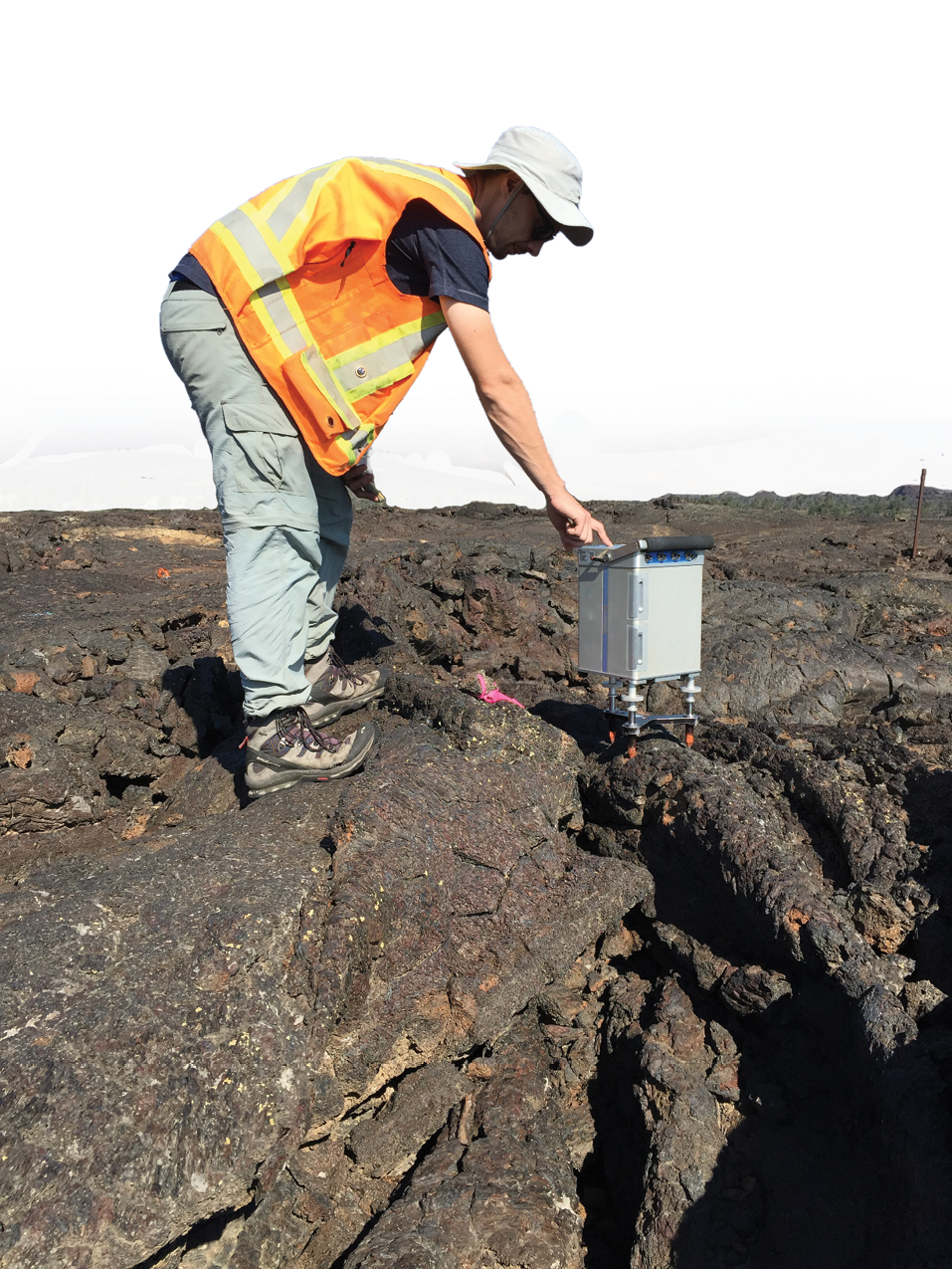
Chris Brown records gravimetry data at a survey point above a subterranean lava tube. Tripod and Kinematic Mobile LiDAR scans were collected at diverse volcanic features to provide ultra-high resolution topography for morphologic studies and contextual data for geophysical analyses.
Consider the task of exploring the surface of other places in our Solar System, like the Moon, Mars, and the icy moons of the outer planets. Given the immense cost of initial exploration, most places will only be visited once and for a relatively short period of time. How do you maximize exploration and scientific discovery with limitations on mobility, time, and cost? What is the strategic knowledge needed to answer the question of how to explore other planets, and what are the right tools and techniques that will provide useful data that may be studied for decades?
The simple answer to these questions is to practice by using comparable places on Earth. The May 2018 issue of this magazine discussed how we use LiDAR at comparative planetary analog sites in the High-Arctic to understand the geomorphology of Mars. In this piece, we discuss how tripod (TLS) and mobile (KLS) LiDAR instruments are being used to develop exploration strategies for NASA’s Solar System Exploration Research Virtual Institute (SSERVI) Field Investigations to Enable Solar System Science and Exploration (FINESSE) program. The FINESSE program is a consortium of more than 30 research scientists, professors, and students whose goal is to generate strategic knowledge in preparation for the human and robotic exploration of the Moon, near-Earth asteroids (NEAs) and Phobos & Deimos. To accomplish this, over the last 4 years FINESSE scientists have explored the Craters of the Moon National Monument and Preserve (CRMO) in the Snake River Plain of Idaho, with the objective of determining the ideal suite of instruments and the observation and sampling strategies needed to maximize scientific exploration in the decades to come.

Antero Kukko collects static data for the IMU and GNSS on the Akhka R3 KLS backpack LiDAR before venturing into the lava tubes (note the headlamp).
To address the FINESSE program goals, those of us interested in LiDAR surveying wanted to show how different LiDAR instruments and surveying techniques can, and should, be considered as integral tools in the future exploration of planets. We applied TLS and kinematic backpack-mounted mobile LiDAR (KLS) techniques to map and study lava flows, lava tunnel networks, and volcanic features. Our work shows that LiDAR data delivers maps for navigation, topography and morphology, and terrain roughness, as well as provides important context for other scientific investigations.

Chris Brown collects magnetometry data around one of the skylight openings of the Indian Tunnel. LIDAR and geophysical data proved to be an exceptionally useful pairing.
The Moon in our Backyard
Craters of the Moon National Monument and Preserve is an enormous region (~1900 km2, ~720 mi2) of the Snake River Plain in southern Idaho. The park features some of the best preserved and youngest basaltic lava flows (as recently as ~2000 years ago) in the continental United States. The park is dominated by extensive lava flows, and has alternatively been described by the first explorers in the 1860’s as “a desolate and awful waste; where no grass grows nor water runs, and where nothing is to be seen but lava,” and as “a mass of ‘black vomit’.” Superficially, these descriptions are correct, but fail to capture the eerie beauty of iridescent blue and green oxidation on the lava flows, and the catastrophic violence the area has experienced in the recent geologic past. It is precisely because of the barrenness of these terrains that makes it an exceptional place to learn how to explore planetary surfaces.
 Exploring with LiDAR
Exploring with LiDAR
The two main roles for LiDAR surveying in exploration are to provide high-accuracy topographic maps and to provide vital context for follow-on scientific measurements. As a stand-alone product, LiDAR point clouds and post-processed raster digital elevation models (DEMs) are essential for terrain mapping, understanding the morphology and morphometry of features, and quantifying the roughness of the terrain (for hazard studies and understanding radar remote-sensing). Within the context of our lava flow investigations, LiDAR serves as an indispensable base map layer for overlays of visible, hyperspectral, and geophysical (e.g. gravity and magnetometry) imagery and data. LiDAR provides precise and accurate spatial understanding of where samples came from, how they were oriented, and their geologic context. Both TLS and KLS systems have delivered exceptionally detailed views of the morphology of different volcanic features, such that we are now just beginning to understand how to use the data to its full potential.
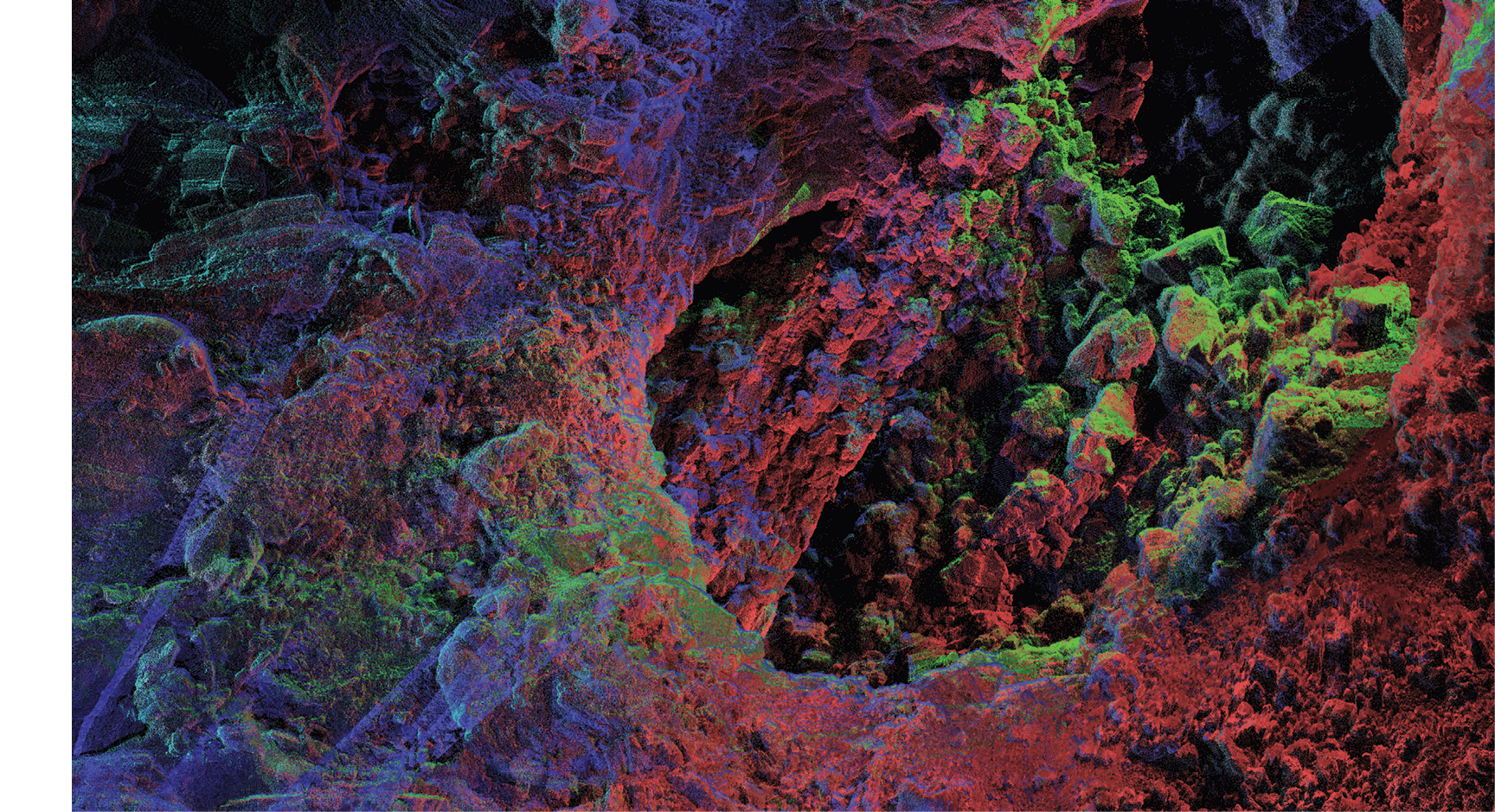
A portion of the interior of the Indian Tunnel lava tube captured by the KLS system and color coded by each minute of data collection. While some parts of the cave floor are smooth, areas under the skylights are cluttered by debris from the collapsed roof. Kukko, FGI, 2018
Technical specs of the LiDARs
The LiDAR point clouds that were produced by our group were done using tripod-mounted TLS and kinematic mobile KLS scanning. The TLS system is a Riegl VZ-400 (RIEGL Laser Measurement Systems GmbH, Austria), mounted with a DSLR and Trimble R8 DGPS (Trimble Inc., USA). Point clouds were processed and matched in RiSCAN Pro 2.3. Our KLS system is the Akhka-R3 Kinematic LiDAR Scanner (KLS), a custom-made backpack-mounted mobile LiDAR scanner developed at the Finnish Geospatial Research Institute. The KLS uses a Riegl VUX-1HA profiling laser scanner coupled to a NovAtel UIMU-LCI inertial measurement unit and a Flexpak6 GNSS receiver coupled with 703-GGG antenna (NovAtel Inc., Canada). Areas of interest were walked (or stumbled over based on the terrain) and scanned at ~150 – 250 Hz profiling and 500 – 1000 kHz pulse repetition frequencies. Precise point processing (PPP) methods using NovAtel’s Waypoint Inertial Explorer and 5Hz DGPS data from a Trimble R10 GNSS base station were used to improve the products from cloud matching in TerraSolid and Riegl software. Given the millimeter-scale ranging precision and beam spot size of 0.5 mrad from the VUX-1HA and the tactical-grade FOG IMU, the KLS has captured surface details at an extraordinary level, often better than 1 cm/pixel raster image resolution.

Locations of TLS tripod sites taken to completely capture the extent of the Indian Tunnel. Surface scans are white dots, interior scans are black squares. A perspective view of the tube is shown to the right. B. Garry, NASA
TLS and KLS systems each served different purposes. Our TLS system was best suited for areas of limited GPS coverage, and excelled in the subterranean mapping of lava tubes. However TLS scanning proved time-consuming for surface scans, requiring multiple scans to minimize shadows. The KLS system was advantageous for rapidly covering large surface areas (acres within hours) while also minimizing shadows. The trade-off with using a KLS system is a more complicated and error-prone processing protocol (dependent mostly on satellite coverage) compared with TLS data processing.
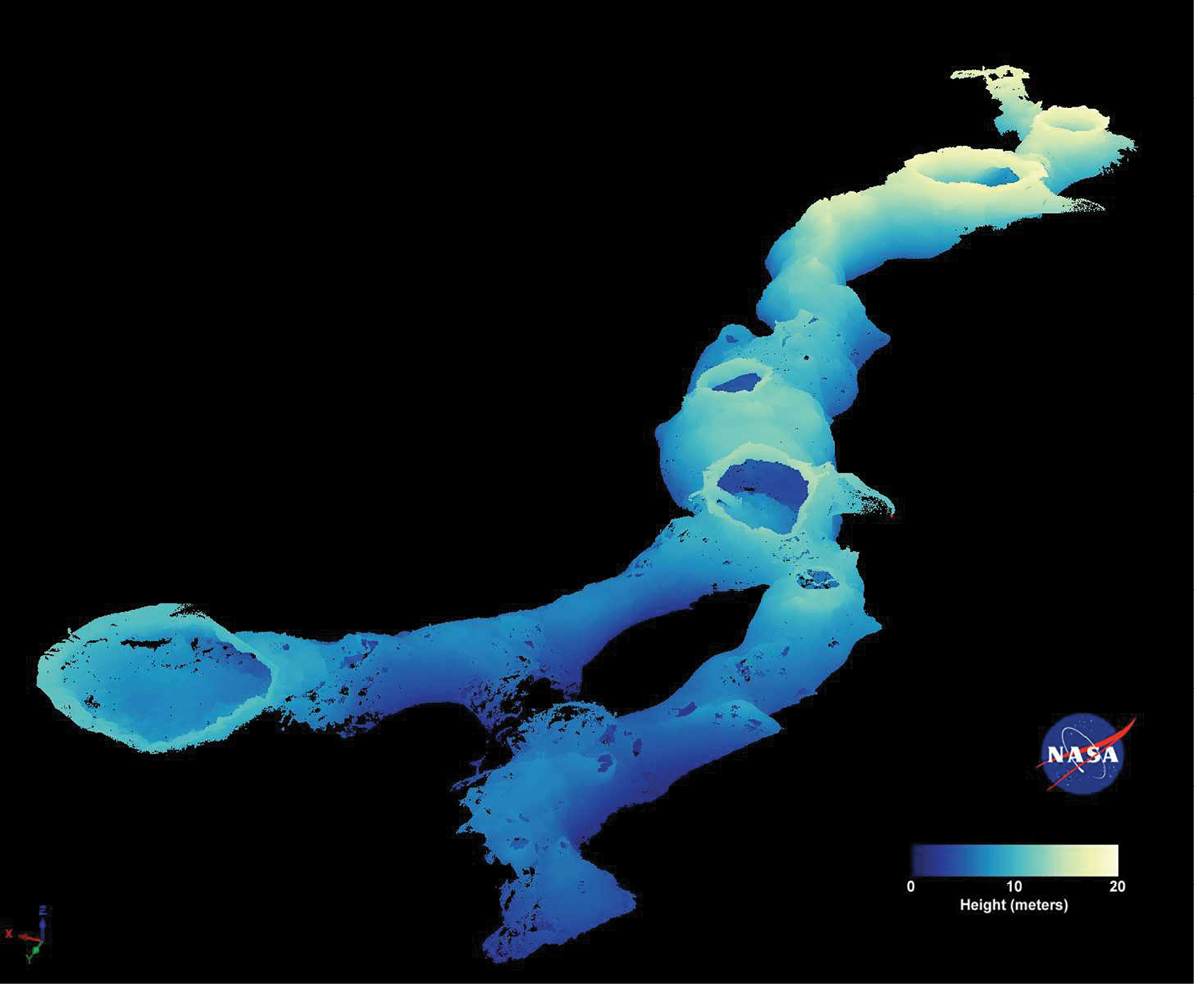
Subterranean map of the Indian Tunnel lava tube as mapped by TLS LiDAR. Approximately 1 billion points were collected at ~50 TLS sites covering the entirety of the 250 m long tube. B. Garry, NASA
LiDAR Scans of Volcanic Terrains
The data we show here is a small collection of the more than 10 acres scanned and 500 GB of data collected. Some features were scanned to understand the detailed geologic evolution of how lava flows are emplaced or volcanic features were formed, while other tasks mapped common hiking trails to support 3D visualizations for the park.
The lavas of Craters of the Moon are nearly all “pahoehoe” style, forming undulating and ropy masses as the lava oozes and flows across the surface. When flowing smoothly, the lava mimics water-rivers (albeit of molten rock) forming eddies, turbulent streams, and “lava-falls”. Sometimes the eruption style changes, becoming more effusive and capable of ripping off the sides of massive cinder cone volcanoes and rafting huge chucks of Earth miles away from their starting points. The frequent changes in eruptive styles result in a myriad of smooth, rubbly, slabby, and blocky surfaces. A recurrent feature within the endless lava-flows in the park landscape are spatter cones. Spatter cones are made by repeated explosions of ‘blobs’ of molten lava that weld together forming relatively small, steep-sided mounds around a central vent. Their conspicuous relief and birthplace of fresh lava flows made them a priority target of KLS scanning activities.

Michael Zanetti maps a rafted lava flow fragment in the Devil’s Orchard region of Craters of the Moon National Monument using the Akhka-R3 KLS system. Trekking poles are a must-have when traversing such rough terrain.
Surveying Lava Tubes
Within Craters of the Moon National Park there are a number of tubes large enough to walk through. The largest and most popular is the Indian Tunnel, a ~250 m (~820 ft) long lava tube cave that is up to 22 m (72 ft) wide and 12 m (40 ft) high. Lava tubes are the remnants of once molten lava rivers flowing through self-made tunnel systems, appearing similar to a city subway system. The top portion of the lava flowing in the channel can cool and solidify, leaving a roof over the still flowing lava stream. When the lava drains a cave remains, and many times the roof is stable enough to support subsequent lava flows over the top of the cave. Many times these cavernous conduits remain hidden from view, but can be found and accessed through collapse pits that expose the interior chambers. Indian Tunnel is accessible by a few of these pits, but primarily by a rudimentary concrete staircase that terminates on a pile of jagged rocks.
The FINESSE team was interested in Indian Tunnel because of its similarity to collapse pits (e.g. skylights) that have been observed on both the Moon and Mars. These extraterrestrial caves might prove to be effective bases for surface operations because they offer relative shelter from harmful radiation and micro-meteorite bombardment, or as locations where extant life on Mars may be found (thus the microbial studies of cave-dwelling species adaptations). Indian Tunnel was sampled multiple times for geologic composition and astrobiological and cave-microbe studies, as well as with geophysical measurements of local gravity and magnetic variations.
LiDAR exploration of Indian Tunnel was done by our group using TLS tripod scans and with the KLS system. The TLS scans done by W. B. Garry consisted of 50 total scans (29 interior, 21 surface) to create a ~1 billion point cloud. TLS scanning of the tunnel was time consuming, requiring nearly 2 full weeks over 2 field seasons to satisfactorily complete.
Serendipitously, the roof collapse pits acted as skylights for GPS signals and are spaced at close enough intervals that the KLS system was also able to be used for subterranean mobile mapping testing. Using the KLS system we were able to map the entire accessible length of the tunnel in less than 20 minutes, and provide complementary coverage to the TLS surveying. Although successful as a test, mapping the cave system this quickly was treacherous with the top-heavy KLS, and post-processing the data was tedious because of GPS drop-out.
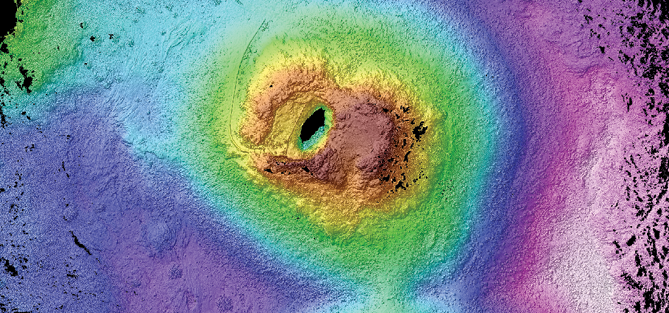
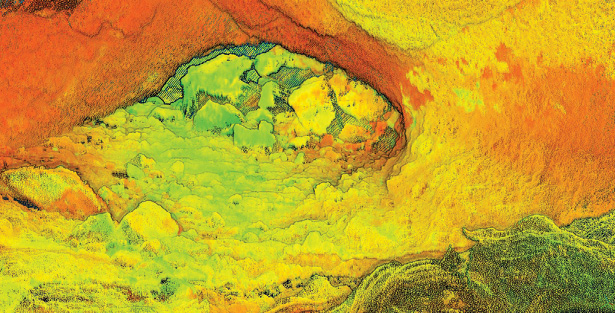
Map view of a DEM created using the KLS scanner of the tourist accessible spatter cone in the park (shown above). The 20 m high dome was created by innumerable “blobs” of lava that exploded from the central vent. A. Kukko and M. Zanetti, 2018
The Role of LiDAR in Planetary Exploration
NASA FINESSE and other research teams are demonstrating that LiDAR instrumentation should be incorporated in future landed surface robotic and human exploration of the Moon and Mars. LiDAR provides ultra-high resolution mapping capabilities which are both accurate and precise. LiDAR’s ability to actively sense the range to targets offers improvements over traditional photogrammetry techniques. LiDAR offers the combination of navigation and science enhancement from a single instrument, which, from the perspective of payload limited spacecraft, offers a significant advantage. The potential virtual reality immersion from a robotic or astronaut traverse made using a seamless and accurate LiDAR surface representation would provide both scientific and public engagement windfalls. Still, challenges exist for the adoption of LiDAR in planetary exploration. Size, weight, and power limits for robotic missions severely limit the design and potential capabilities of compact LiDARs to operate and survive in harsh planetary environments. Larger, pressurized rovers used by astronauts could handle a more powerful planetary LIDAR system. Cloud matching in GPS-free and natural-surface environments, even with SLAM and LOAM techniques, needs to be demonstrated to be accurate and reliable before LiDAR will usurp photogrammetry as the ‘topography-of-vogue’. Somewhat unique to planetary exploration, point-cloud data volumes could present a barrier. With new space-based laser communications, such as the Lunar Laser Communications Relay Demonstration on the NASA LADEE mission, downlink of nearly 20 Mbps has been achieved. This may solve the problem for lunar exploration, but high data rates will remain elusive for Mars for a long time to come. Regardless, there is both the interest in, and need for, LiDAR in planetary exploration.
Dr. Michael Zanetti is a geologist and research scientist at NASA’s Marshall Space Flight Center in Huntsville, Alabama. He participated in the FINESSE program as a post-doctoral fellow at the University of Western Ontario with Drs. Catherine Neish and Gordon Osinski. He specializes in comparative planetary geomorphology of the Earth, Moon, and Mars, with focus on the integration of ground-based LiDAR with satellite remote-sensing data.
Prof Dr Antero Kukko is Head of the Mobile mapping and Autonomous Driving Research Group at the Finnish Geospatial Research Institute and adjunct professor in the Department of Built Environment, Aalto University, Finland. His research focuses on the development and application of mobile/kinematic laser scanning in geosciences and engineering.
Chris Brown is a geophysicist with over a decade of experience applying airborne, ground and borehole geophysical methods to assist in the detection and characterization of various types of mineral deposits all over the world.
Dr. W. Brent Garry is Geologist at NASA’s Goddard Space Flight Center in Greenbelt, Maryland, USA. He investigates volcanic terrains and lava flow emplacement processes on Earth for comparison with the Moon and Mars with a focus on geomorphology and geologic mapping.
Dr. Catherine Neish is an assistant professor of Earth Sciences at the University of Western Ontario in London, Ontario. She is an expert in the use of radar remote sensing for the understanding of the geologic evolution of the Earth and other planets. She is a collaborator on the FINESSE project, and led the Western field expeditions to COTM, with funding from the Canadian Space Agency.